Überblick
- Anbindung Ladegerät an Kontaktsysteme
- Verteilung der Leistung auf die Ladepunkte
- Ladegerät hoher Leistung
Anbindung Ladegerät an Kontaktsysteme
Um ein hohes Maß an Herstellerunabhängigkeit zu erzielen sind Adaptionen für drei unterschiedliche Kontaktsysteme geplant.
- Adaption ACD-U
Der Energietransfer erfolgt analog zum CCS-System über Kontakte für DC+ und DC-, die direkt vom Ladegerät gespeist werden. Zur Erkennung von Isolationsfehlern wird zusätzlich das PE-Potential an das Fahrzeug gegeben. Zur Erkennung von Unterbrechungen des Energietransfers wird ein eigener CP-Kontakt genutzt. Unterbrechungen in der gemeinsam mit den DC-Leitungen geführten CP-Leitung führen zu einer sofortigen Unterbrechung der DC-Energiezufuhr durch das Ladegerät. Damit wird eine Lichtbogenbildung im Fehlerfall verhindert.
Beim ACD-U erfolgt die Kommunikation zwischen Fahrzeug und Lader drahtlos gemäß dem Protokoll OppCharge und der ISO15118-8. - Adaption CCS-Stecker
Auch der CCS-Stecker wird direkt vom Lader mit DC+ und DC- gespeist und die PE-Anbindung wird genutzt. Der CP-Kontakt wird beim Laden überwacht zur Erkennung einer Unterbrechung.
Abweichend zu ACD erfolgt die Kommunikation aber via PLC auf dem CP-Kontakt nach ISO15118-3. - Adaption MCS-Stecker
Die Adaption des MCS Steckers erfolgt analog zu CCS-Stecker. Allerdings ist hier die Kommunikation durch ein zusätzliches Kontaktpaar geplant, welches ein differentielles Signal führt und so Probleme bei der Nutzung der PE-Leitung wie bei CCS umgeht.
Im Projekt werden die ersten beiden Kontaktsysteme realisiert und erprobt. Die Kontaktierung via MCS-Stecker wird vorbereitet.
Der konkrete Aufbau wird in einer Wallbox erfolgen, welche die notwendigen Kommunikationsschnittstellen enthält. Die Wallbox wird mit einem fest angeschlagenen CCS-Kabel ausgerüstet und enthält die notwendigen Modems und die Steuerung für das ACD-U. Die Wallbox kommuniziert mit dem Ladegerät über einen CAN-Bus. Dies erlaubt es auch größere Entfernungen zwischen Leistungselektronik und Kontaktstelle sicher zu erzielen.

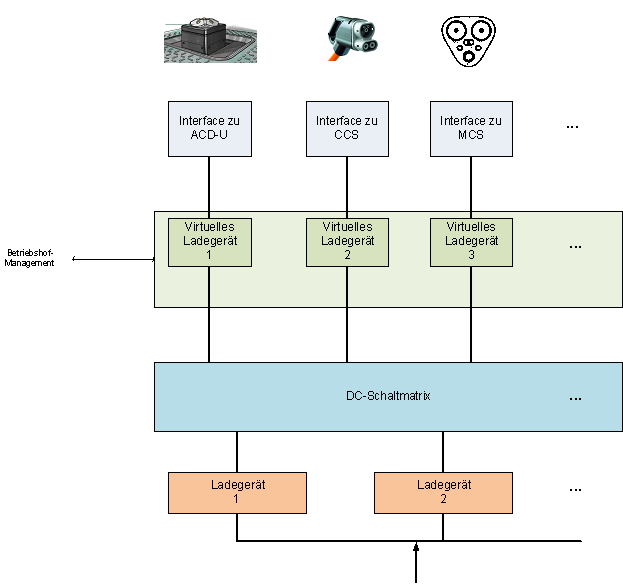
Verteilung der Leistung auf die Ladepunkte
Betracht man die typische Anwendung eines Logistikhofs erkennt man, dass an allen Anlieferungspunkten der Ware nur kurze Haltezeiten eingeplant sind. Aus diesem Grund soll dort mit möglichst hoher Leistung geladen werden. Aufgrund der Vielzahl der Anlieferungspunkte wäre es unwirtschaftlich jeden Ladepunkt mit einem eigenen Ladegerät hoher Leistung auszustatten. Daher bietet es sich an mit weniger Ladern die Leistung bedarfsabhängig auf die Entnahmepunkte zu schalten.
Aus Sicht der Fahrzeuge müssen aber alle Ladepunkte als passend angezeigt werden, da die Leistung an allen Stellen entnommen werden kann. So kommt es zu der Bezeichnung virtuelle Ladepunkte.
Die Umsetzung der virtuellen Ladepunkte wird im Projekt erprobt. Dazu besitzen alle Ladepunkte ein vollständiges Kommunikationsinterface zum Fahrzeug und zum Betriebshofmanagement, um diesem die Ankoppelmöglichkeit zu signalisieren. Wenn Fahrzeuge eintreffen soll die real vorhandene Leistung aus den angeschlossenen Leistungsteilen auf die tatsächlich genutzten Ladepunkte mit einer DC-Verteilmatrix verteilt werden.
Ladegerät hoher Leistung
Um die benötigte hohe Ladeleistung zu erzielen ist geplant mehrere Lader parallel zu schalten.
Die Parallelschaltung erfordert eine gute Synchronisation der Einzellader um unerwünschte Ausgleichsvorgänge zu vermeiden. Im Projekt soll die dafür notwendige Technik erarbeitet werden.