Overview
- Outset
- Concept and operating principle of the underbody charging system
- Advantages of the MEGA-LADEN solution
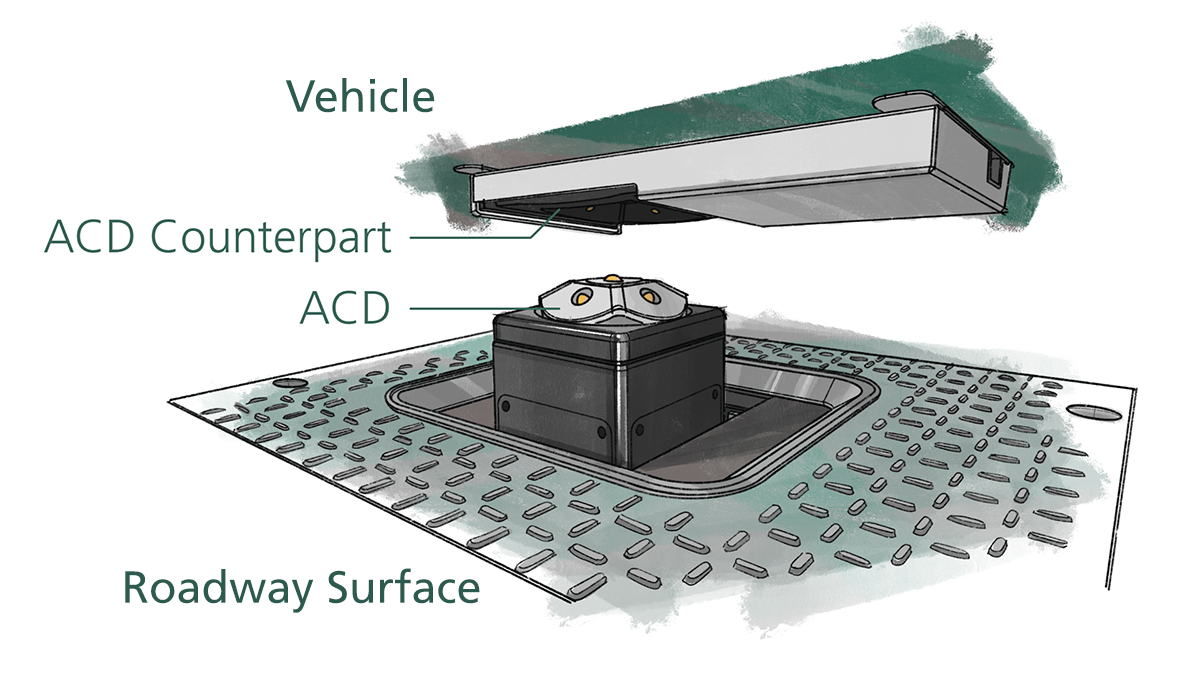
- Vehicle component of the contact system (ACD counterpart)
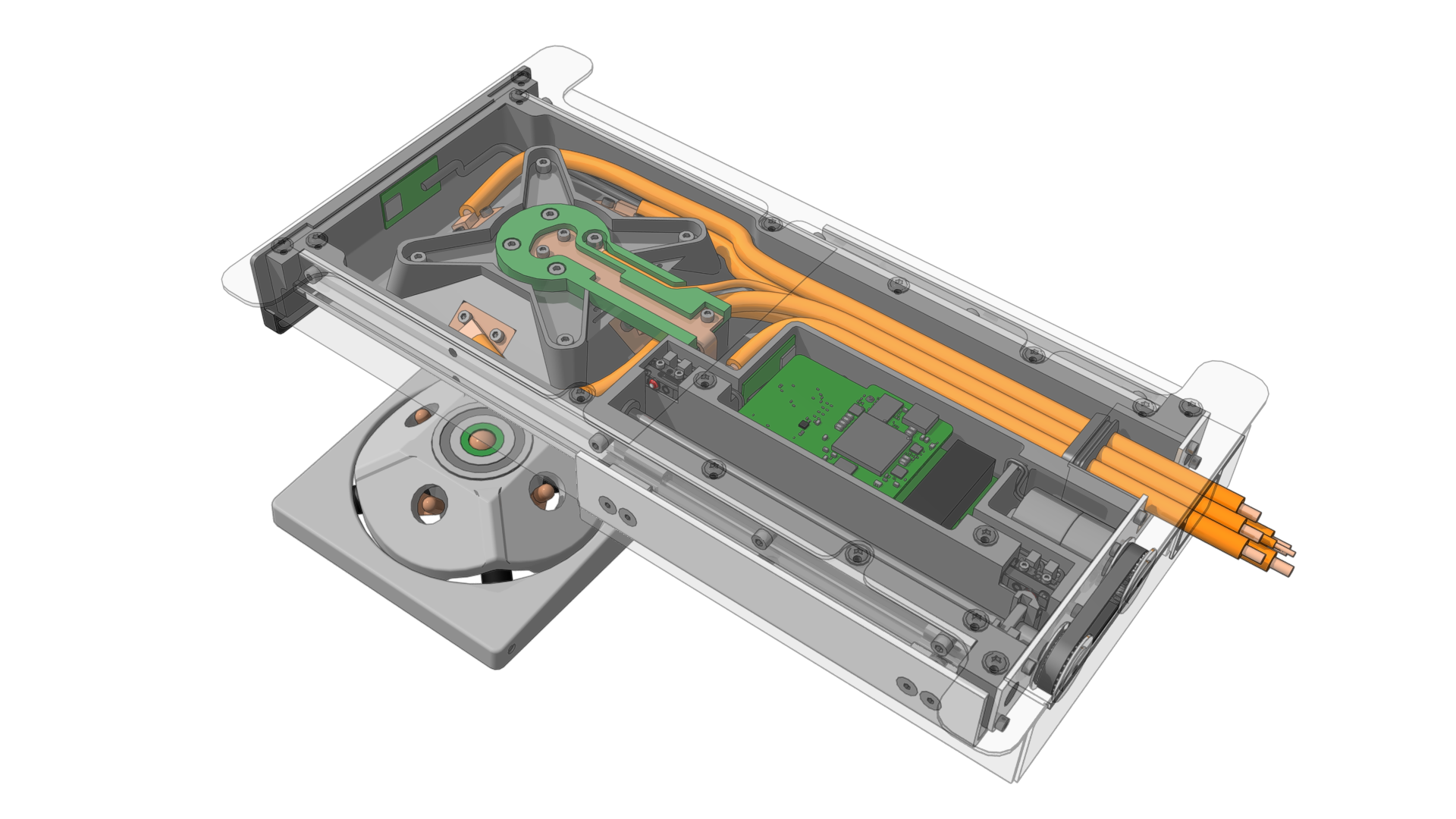
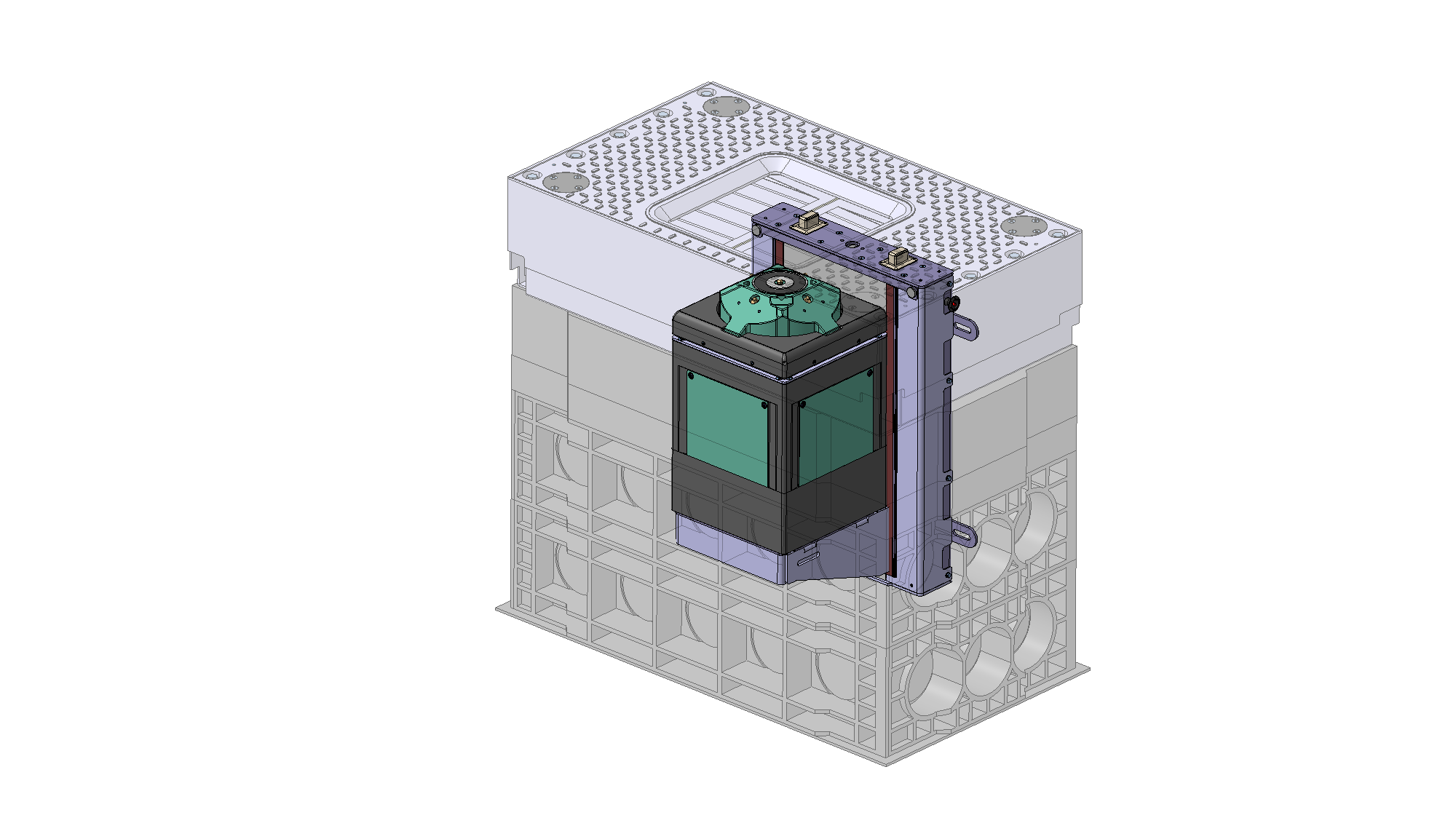
- Infrastructure component of the contact system (ACD)
- Safety and standardization
Outset
The logistics sector continuously puts great effort into realizing and maintaining the cost-effective operation of heavy commercial vehicles. For example, investments in highly automated logistic hubs are made with the aim of shortening the time spans needed for loading and unloading cargo. Given the premise that due to environmental policy there is no alternative to switching to emission-free drive technologies, it is crucial from an economic stanpoint that the charging or filling procedures for these new technologies will not result in longer idling or standstill times of the vehicles involved. Therefore, a new generation of charging systems with extremely high charging capacities, so-called Mega Charging Systems (MCS), is needed.
Within the MEGA-LADEN project, such a system is currently being developed and will subsequently be tested in regular day-to-day logistics operations.
In the field of e-buses, two charging systems have become established in the market: the first transmits energy at low power levels via manually operated plugs, the second realizes very short charging times at very high power levels via a roof pantograph. Compared to e-buses, commercial vehicles have considerably less roof space available for installing a relatively bulky pantograph. Also, the roof layout of commercial vehicles is often very varied because additional devices such as air-conditioning units and roof spoilers further restrict the available installation space. Therefore, it is necessary to choose a different location for installing an automated contact system in commercial vehicles.
In contrast to the vehicle roof, the layout of the vehicle underbody is very similar across almost all car manufacturers. An installation space analysis including a wide range of manufacturers and models showed that the suitable contact counterpart for a conductive energy transfer system can be installed in all vehicles checked. In addition, the integration of an automated charging system in the vehicle underbody (ACD-U) requires it is much less complicated in terms of safety than integration into the side of the vehicle.
Concept and operating principle of the underbody charging system
The contact system operates automatically, which means that users will not come into contact with any of the system's elements nor with the vehicle's high voltage system. Each charging procedure is executed according to the following simplified pattern:
- The driver moves the vehicle to a location equipped with underbody charging infrastructure – e. g., a car park or a loading ramp in a logistics center – and secures it against driving off.
- The charging process is requested by pressing a button in the vehicle.
- From this moment on, the establishment of an electrical contact is fully automated.
- The vehicle checks in with the charging station and authenticates itself.
- The ACD counterpart opens its security cover.
- The ACD extends and connects to the ACD counterpart.
- An electromagnet located in the contact head is activated. A strong contact force builds as a result.
- The charging process is executed according to ISO 15118-20.
- The driver / user concludes the procedure.
Advantages of the MEGA-LADEN solution
- Automated contacting:
- Drivers / users do not come into contact with any parts of the contact system, such as a plug.
- Drivers / users do not come into contact with any parts of the vehicle's high voltage system.
- Drivers do not need specific training – the key word being "electrical safety".
- Because the only work to be done by the driver is pushing a button, there is no issue in terms of driving times and break times.
- Only one active part per component:
- Parts that are not there, cannot break.
- Positioning tolerances are compensated strictly passively.
- No active component is needed for the ACD to return to its idle position (underground) during regular procedure or in case of failure.
- The cover flaps close automatically after the ACD retracts, no accidental holes will be left in the roadway.
- Contact force established by utilizing an electromagnet:
- The Electromagnet creates strong contact forces.
- At the same time, the connection is secured against accidental disconnecting through non-positive locking.
- Compliance with the standardized order for de-contacting, as well as
- Drop-out delay allows the infrastructure component to power down safely.
- Standard parts:
- The shaft to be installed underground is a standard part in terms of procurement and installation.
- Safety:
- Charging standard according to ISO 15118-20 "opp-charge"
- System conforms to class D400 and is checked according to EN124, meaning that it is safe to drive over
- Infrastructure requirements:
- No additional (road) construction work is required for positioning the vehicle.
- The ACD is fitted into a standard plastic shaft that can be dug into the ground easily and with minimum costs.
- Suitable for all weather conditions due to connection to local drainage system and additional heating elements.
Vehicle component of the contact system (ACD counterpart)
Based on the results of an installation space analysis across all major car manufacturers and models, it is possible to install or retrofit the ACD counterpart – "Automated Charging Device Counterpart" – in all electrified commercial vehicles. The electrical dimensioning criteria are: overvoltage category II, contamination level 3, as well as reinforced insulation.
Integrated temperature monitoring is an optional feature of the ACD counterpart. A security cover prevents unauthorized manipulation and offers additional protection from contamination with dirt. Based on the shape selected for the component, a space-saving safety catch suited for bidirectional operation was developed to ensure safe connection to the ACD. Two additional important features are the system's low overall weight and compact shape.
Infrastructure component of the contact system (ACD)
The contact system's infrastructure component, the so-called "Automated Charging Device" (ACD) is responsible for both establishing the connection to the vehicle and compensating for the vehicle's rolling, pitching and height movements. In addition, it must be able to extend to different heights to suit different truck types and models. The ACD is installed below the roadway but is flush with the roadway surface.
Safety and standardization
If charging intervals are short, the charging capacity must be high. The MCS system approach, which is currently undergoing standardization, aims to achieve the required capacity through high system voltages of up to 1250 VDC, but most importantly through very high charging power levels of up to 3000 A. Correspondingly, the associated energy transfer devices must be especially safe and robust. This refers to prevention from touch and manipulation, compulsory clearance and greepage distances, prevention of arcs that might occur as results of accidental decontacting, undesirable heat development, and the implementation of a control procedure governing the charging process. In addition, fundamental safety regulations were incorporated in the design of the automated contact system by Fraunhofer IVI engineers at an early stage. Among others, these regulations concern protection against slipping and becoming trapped or stuck.
The MEGA-LADEN project team complements their system development work with active participation in the following standardization bodies and stakeholder groups, both on a national and an international level:
- Founding member of DKE working group 353.0.13 (Automated conductive charging)
- Member of international IEC-TC69-WG14 mirror committee (EV supply equipment with automated connection of a vehicle coupler)
- Solution proposal "Automated Charging Device Underbody (ACD-U)" for private and public charging (Annex D of future IEC 61518-26 standard; currently under development)
- Deputy head of working group "ACD-U" within Charging Interface Initiative e. V. (CharIn)
- Founding member of DKE working group 542.4.8 (ACD-U Interface)
- Participation in DKE working group 353.0.02 (Mega Charging System MCS)